TVC Rocket
The goal of this project is to create a rocket capable of Thrust Vector Control (TVC). My other rockets all use fins to passively keep themselves oriented during flight. This works well but only works at high speeds and is not super precise. Thrust vectoring physically moves the engine to control the rocket’s orientation! The objectives of this project are:
Static fire test the thrust vector control system multiple times
Maintain stability during flight using thrust vectoring
Build a modular rocket that is easy to prototype
Recover the rocket using an onboard deployment system
Fly using a long-burning G12ST motor
Record data to refine our models and the rocket’s behavior
This project is in collaboration with Henry Wykoff! This rocket will have onboard sensors, computers, and servos in order to help guide it and record data!
Experimental Rocket Design
Overview
Vehicle Height
1352 mm / 53.22 in
Vehicle Diameter
101 mm / 4 in
Systems
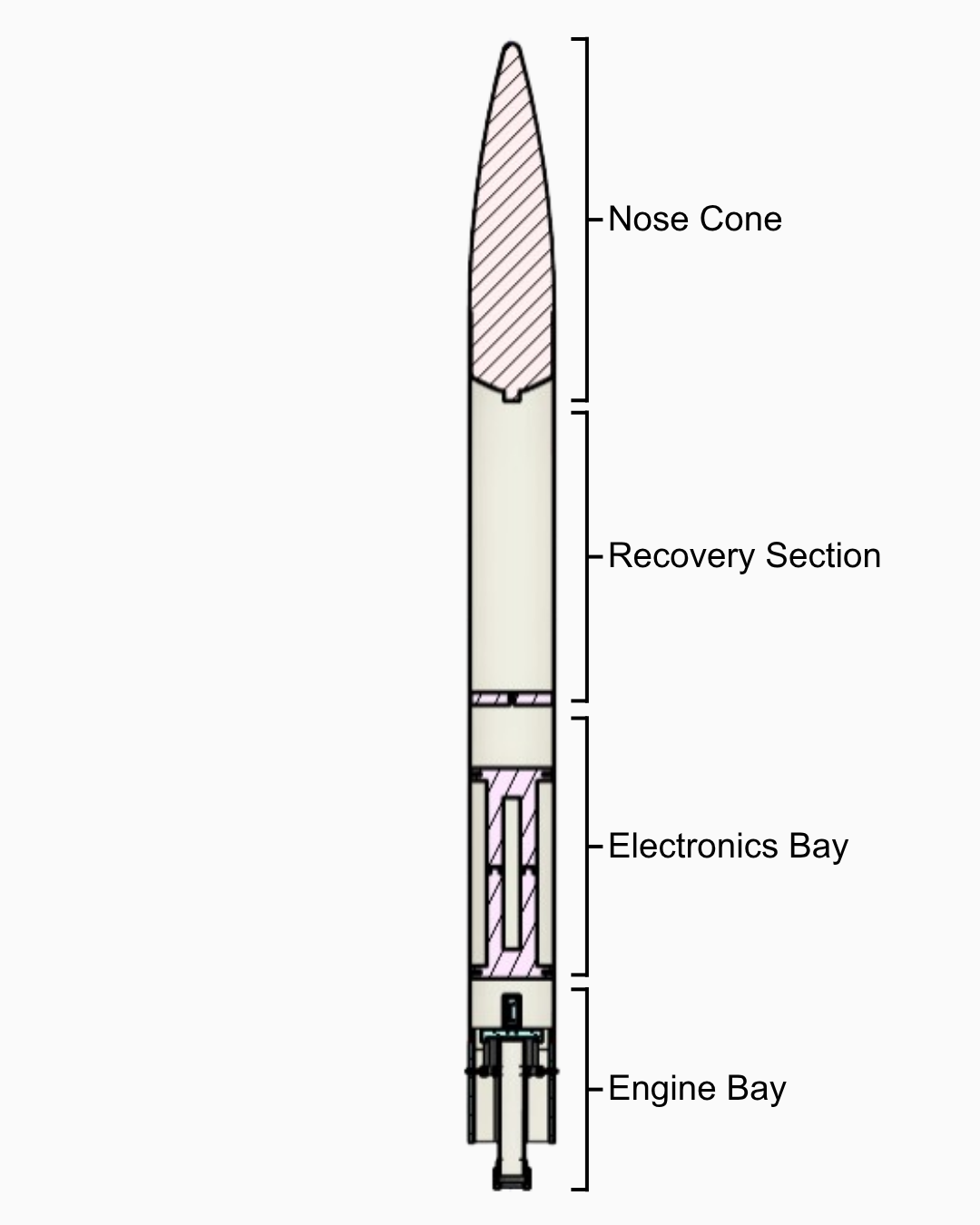
The vehicle is split into three main sections:
the recovery section houses the parachute, shock cord, chute release, deployment electronics, as well as explosive deployment charges
the electronics bay houses all electronics necessary for thrust vector-controlled flight. This includes batteries, accelerometers, and gyroscopes
The engine bay houses the rocket’s motor and the servos that orient it during ascent

Gimbal Mount
The rocket’s gimbal mount is equipped to fly with a plugged G12ST motor
The motor tube is mounted on a two-axis pivot and is connected to two servos
The servos allow the motor tube to precisely point in order to orient the rocket during ascent
The two servos are both connected to electronics in the electronics bay that tell them how to operate and track the rocket’s telemetry